
Франшиза Центр робототехники и программирования ШАРОБОТ, г. Санкт-Петербург
О ФРАНЧАЙЗЕРЕ:
Мы — центр робототехники и программирования ШАРОБОТ для детей 4-12 лет на базе наборов LEGO Education.
Образовательные программы для обучения по робототехнике и программированию разработаны для детей 5 возрастных категорий.
Малышей 4-5 лет знакомим с элементарными механизмами и деталями — шестеренками, осями, ремнями, балками и шкивами, учим создавать простейших роботов. Ребятам 5-6 лет рассказываем о физике силы и равновесия. Детей 7-8 лет учим работать с конструкторами LEGO WeDo 2.0 и даем азы программирования. Ученики 9 лет и старше осваивают наборы Mindstorms EV3, собирают и программируют сложных роботов. Ученики 8-12 лет обучаются программированию Scratch. Создают свои проекты и игры.
Основали компанию в 2016 году в Санкт-Петербурге супруги Валерий и Юлия Кожевниковы.
В 2017 году разработали собственную систему обучения и запуска центров партнёров для город России.
В 2020 году запустили свою собственную онлайн платформу обучения детей робототехнике.
25 центров в сети.
ФРАНЧАЙЗИНГОВОЕ ПРЕДЛОЖЕНИЕ:
Какой пакет услуг вы получаете:
— Совместно подберём необходимое помещение и проверим наличие целевой аудитории в локации центра.
— Обучим Вас всем бизнес процессам успешной работы центра.
— Вместе подберём необходимый высококвалифицированный педагогический и административный персонал.
— Обучим всем процессам и необходимым педагогическим компетенциям.
— Предоставим разработанные образовательные программы с тематическим планированием и технологическими картами к каждому занятию для пяти возрастных групп начиная с 4-х лет.
— Предоставим удобную и функциональную систему учёта новых и действующих клиентов (CRM) и обучим работе в ней.
— Предоставим скидку на покупку необходимого оборудования до 30%.
— Создадим страницы и группы в социальных сетях. Совместно запустим таргетированную рекламную кампанию и привлечём первых клиентов в новый центр.
— Предоставим все маркетинговые наработки и научим использовать работающие каналы привлечения клиентов.
— Окажем полную юридическую поддержку наших партнёров и постоянное обучение.
Нам важно, чтобы образование вышло на новый уровень, чтобы качество услуг улучшилось, а собственники получали достойную прибыль и удовольствие от бизнеса.
Инвестиции, необходимые для открытия центра робототехники и программирования — «ШАРОБОТ»
Расход на запуск:
мебель и оборудование — 90 000 ₽,
конструкторы LEGO — 250 000 ₽,
компьютеры и оргтехника — 175 000 ₽,
реклама и маркетинг — от 45 000 ₽.
Есть ли ограничения по количеству франшиз в городах: да
ТРЕБОВАНИЯ К ПОКУПАТЕЛЮ ФРАНШИЗЫ:
Достаточный размер инвестиций, зарегистрированное юр лицо. Личные качества — готовность соблюдать требования и стандарты компании, желание оказывать качественные услуги, высокая скорость принятия решений.
ТРЕБОВАНИЯ К ПОМЕЩЕНИЮ:
Расположение не выше второго этажа здания, площадь — 35-70 кв.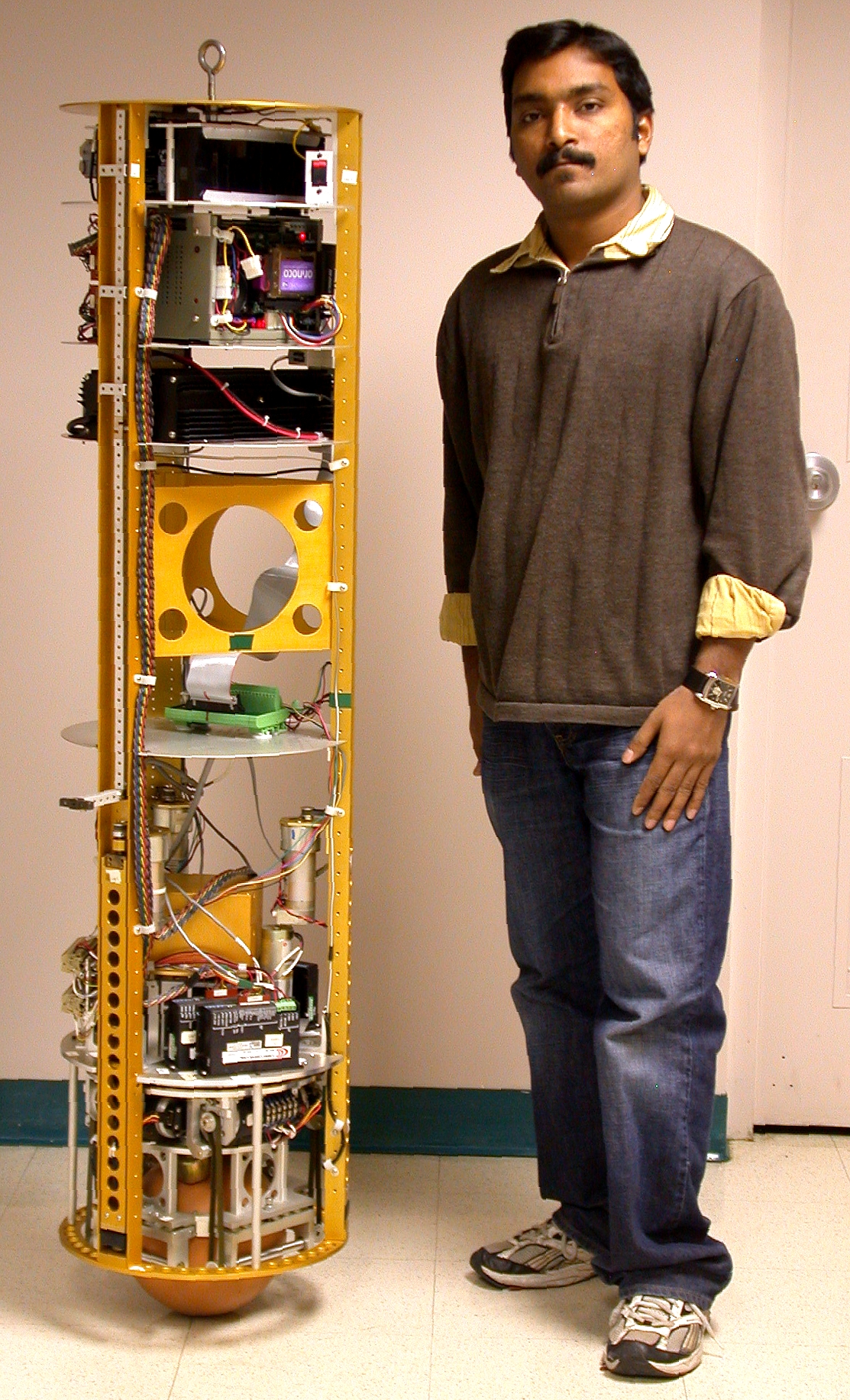 м., планировка — один-два учебных кабинета, зал ожидания, ресепшн, санузел. Естественное освещение в классах, электричество, отопление, горячее и холодное водоснабжение.
м., планировка — один-два учебных кабинета, зал ожидания, ресепшн, санузел. Естественное освещение в классах, электричество, отопление, горячее и холодное водоснабжение.
КОНТАКТЫ:
Телефон: 8 (800) 500-77-85
E-mail: [email protected]
Шаробот — это… Что такое Шаробот?
Шаробо́т (англ. Ballbot) — подвижный робот, использующий для передвижения единственное сферическое колесо (т.е. шар), и постоянно самобалансирующий на нём как в движении, так и в покое[1][2][3]. Благодаря единственной точке контакта с поверхностью, шаробот одинаково легко передвигается во всех направлениях, являясь чрезвычайно подвижным, манёвренным, и естественным в движениях, по сравнению с обычным наземным транспортом. Проектирование надёжных роботов с узкой колёсной базой, обладающих улучшенной манёвренностью в ограниченных, переполненных и динамичных средах (например узкие коридоры и заполненные передвигающимися людьми помещения) стало возможным благодаря наработкам в теме динамической стабильности в современной теории управления.
Общие сведения и основные свойства
Шаробот Rezero балансирующий на плоской поверхности. Характерными особенностями шаробота являются: шар, три электромотора, приводящие в движение балансировочные колёса и основной корпус, содержащий микропроцессор, блок инерциальных измерений, блок питания и батареи.Исторически сложилось, что подвижные роботы создавались статически неподвижными, что приводило к экономии энергии при стоянии робота на месте. Обычно это достигается использованием трёх и более колёс прикреплённых к платформе. Роботы, построенные по этой модели, зачастую нестабильны при движении, что может быть компенсировано очень широкой колёсной базой и низким центром тяжести. Это сильно ограничивает применение таких роботов в обычной обстановке в присутствии людей, где не только интерфейс пользователя должен быть расположен на доступной высоте, но и подвижность робота затруднена узкими проходами, наличием большого количества препятствий, в том числе людей.
Шароботы решают вышеупомянутые проблемы используя для движения единственное сферическое колесо, управляемое исполнительными устройствами. Шароботы изначально неустойчивы и используют исполнительные устройства для поддержания себя в равновесии. Это также приводит к небольшим, но постоянным смещениям шаробота. Это неустойчивое, но стабильное состояние, называемое динамической стабильностью, намного более устойчиво к внешним воздействиям, например толчкам, нежели статическая стабильность. Это ещё более очевидно в высокоинерционных роботах, например с высокорасположенным центром тяжести[5].
Динамическая стабильность шаробота, в сочетании со сферическим колесом, которое уменьшает контакт с поверхностью до единственной точки, обеспечивает шароботам уникальные достоинства среди наземных транспортных средств.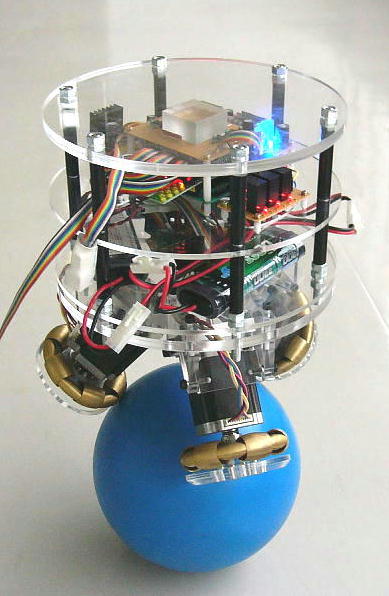 Шароботы всенаправлены и могут двигаться в любом направлении в любое время. Манёвренность шаробота ограничена только его динамикой, в отличие от механических ограничений, налагаемых колёсами (например невозможность движения боком). Шароботы обладают нулевым радиусом поворота
Шароботы всенаправлены и могут двигаться в любом направлении в любое время. Манёвренность шаробота ограничена только его динамикой, в отличие от механических ограничений, налагаемых колёсами (например невозможность движения боком). Шароботы обладают нулевым радиусом поворота
Другой интересной особенностью является неминимально-фазовое поведение шаробота. Для движения в любом направлении, шаробот должен наклониться в этом направлении для приобретения ускорения. Поэтому, для указания желаемого направления движения, шар должен быть кратковременно отклонён в противоположном направлении. По достижении заданной скорости, шаробот выпрямляется и далее двигается, сохраняя вертикальное положение.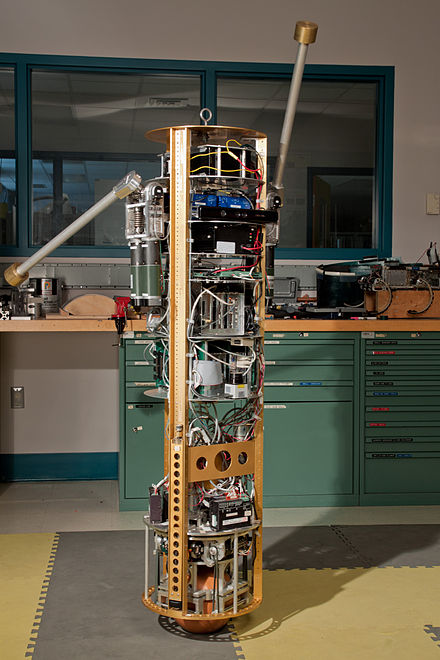
Применение шароботов
Шароботы обладают тремя уникальными характеристиками, каждая из которых открывает им ряд практических применений. Динамическая стабильность позволяет использовать шароботы в условиях большого количества толчкообразных помех. Примерами подобных условий являются корабли и поезда, а также помещения со скоплениями людей, такие как вокзалы, музеи и другие общественные учреждения. Всенаправленность шаробота и способность быстро изменять направление движения позволяет ему быстро двигаться в помещениях коридорного типа. Высокое расположение центра тяжести позволяет удобно расположить органы управления и интерфейс пользователя. На данный момент наиболее привлекательным видится использование шароботов для информирования людей в общественных учреждениях, в качестве ежедневного помощника или бытового робота, или в качестве игрушки.
Примечания
- ↑ Accent Робот на шаре (рус.). IXBT.com (13 августа 2006). Архивировано из первоисточника 6 сентября 2012. Проверено 11 декабря 2011.
- ↑ insiderobot Оригинальные конструкции роботов (рус.). http://insiderobot.ya.ru+(24марта 2008). Архивировано из первоисточника 6 сентября 2012. Проверено 11 декабря 2011.
- ↑ Робот на шаре (рус.). http://www.roboclub.ru+(2006-08-1).(недоступная ссылка — история) Проверено 11 декабря 2011.
- ↑ Tom Lauwers; George Kantor, Ralph Hollis One is Enough! (PDF). 12th International Symposium on Robotics Research 10. The Robotics Institute at Carnegie Mellon University (12 октября 2005). Архивировано из первоисточника 6 сентября 2012.
 Проверено 14 августа 2006.
Проверено 14 августа 2006. - ↑ Tom Lauwers; George Kantor, Ralph Hollis A Dynamically Stable Single-Wheeled Mobile Robot with Inverse Mouse-Ball Drive (PDF). IEEE International Conference on Robotics and Automation 6. The Robotics Institute at Carnegie Mellon University (16 мая 2006). Архивировано из первоисточника 6 сентября 2012. Проверено 14 августа 2006.
- ↑ 1 2 Simon Doessegger, Peter Fankhauser, Corsin Gwerder, Jonathan Huessy, Jerome Kaeser, Thomas Kammermann, Lukas Limacher, Michael Neunert (2010-06-21). «Rezero, Focus Project Report» (PDF) (Autonomous Systems Lab, ETH Zurich): 202.
 Проверено 14 августа 2006.
Проверено 14 августа 2006.Ссылки
Онлайн-журнал Robome.ruЧто такое шаробот? — Онлайн-журнал Robome.ru
F. A. Q.Published on Декабрь 2nd, 2013 | by Павел Брызгалов
Шаробот (ballbot) – это мобильный робот. Он наглядно демонстрирует, что даже такую проблему, ка организация движения робота можно решить неожиданным способом. А способ этот заключается в том, что шаробот может двигаться используя только одну точку опоры с поверхностью. Он стоит на месте, ездит из стороны в сторону и даже «танцует» благодаря всего одному шару в основании.
Это стало возможно благодаря наработкам в теме динамической стабильности в современной теории управления. Принцип действия шаробота схож с теорией об обратном маятнике. Это значит, что для сохранения равновесия ему необходимо постоянно немного двигается, чтобы не упасть.
Первый шаробот был представлен еще в 2005 году. Он был достаточно устойчив, чтобы выдерживать не сильные толчки и при этом не падать. Он также продемонстрировал возможность самостоятельно выбирать маршрут при перемещении среди людей.
Шароботы имеют, как минимум, два плюса:
— Высокая динамическая стабильность, то есть они могут работать в условиях постоянных толчков и столкновений, например, с вечно неуклюжими людьми, или на кораблях, или поездах.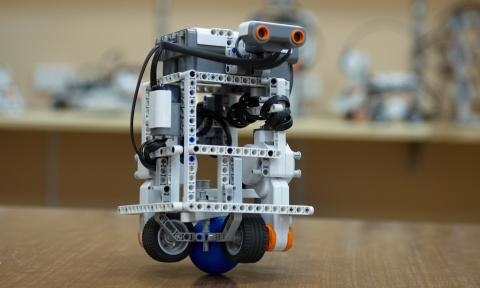
— Чем выше расположен центр тяжести, тем лучше. А это значит, что можно расположить интерфейсы, с которыми работают люди, на той высоте, на которой это будет удобно.
Tags: Шаробот
About the Author
Павел Брызгалов Редактор раздела технологии. Окончил магистратуру МГТУ «СТАНКИН» на кафедре «Робототехника и мехатроника».
Related Posts
Робототехника: Skolkovo Robotics
Skolkovo Robotics собрало выдающихся международных экспертов, исследовательские и научные коллективы.
Можно было увидеть роботов для выполнения задач диагностики, технического обслуживания, ремонта и демонтажа оборудования в тяжелых условиях, для работ по деактивации и демонтажу оборудования АЗС.
Большинство техники создано, чтобы максимально помогать людям. Вот мобильный робот с развитой бортовой информационно-измерительной системой способен функционировать в слабоструктурированных средах.
Вот мобильный робот с развитой бортовой информационно-измерительной системой способен функционировать в слабоструктурированных средах.
Персональная робототехника — это та, что влияет на человека, так или иначе касается жизни человека или имитирует человека. А сервисная — более узко служит нам, решая какую-то одну задачу очень хорошо. Так, например, Amazon приобрели компанию Kiva Systems. Им удалось повысить продуктивность — ускорить нахождение и доставку товара до менеджера в пять раз. Они собираются создать крупнейшие роботизированные складские комплексы. Главным рабочим элементом этих комплексов будет робот-сортировщик, который будет выбирать и отсортировывать на складе, привозить человеку для отправки покупателям приобретенные интернет-пользователями товары.
По словам Альберта Ефимова, директора по проектам IT кластера Сколково, совсем скоро в сегменте роботов для населения будут все более популярными машины, оказывающие непосредственную поддержку человеку.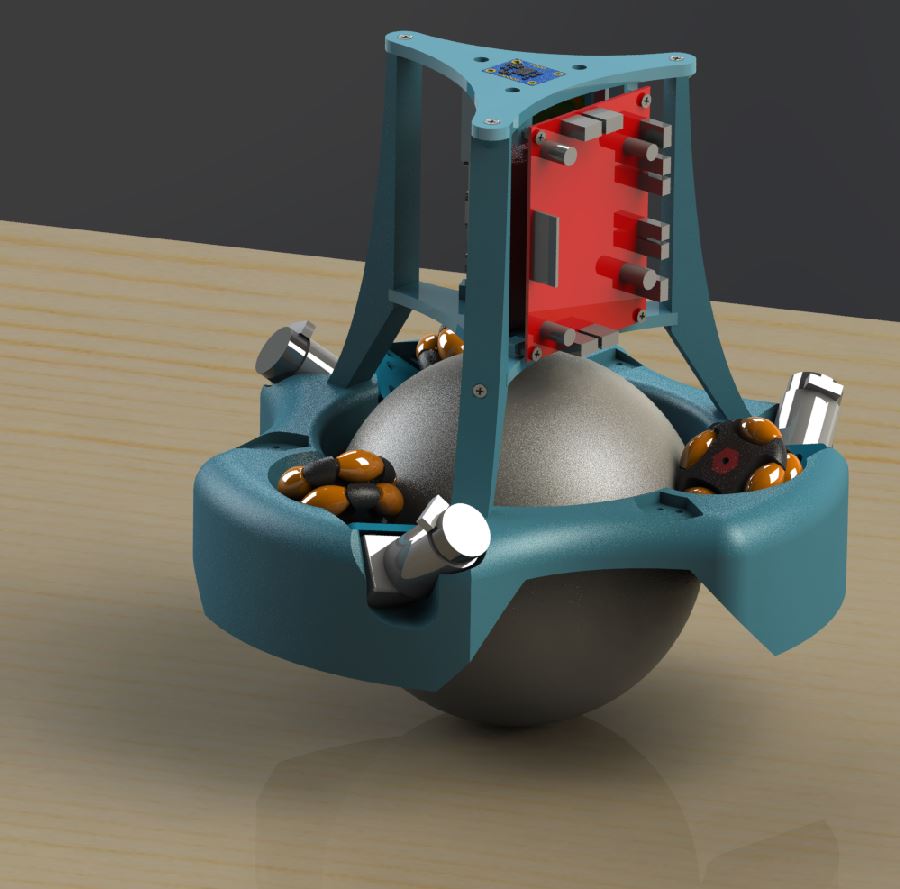 Например, роботы в больницах, сервисные роботы-официанты или хостес-роботы в ресторанах. Возможно, роботы для теле-презенса, позволяющие удаленно присутствовать и перемещаться по объекту, видя происходящее вокруг видео-камерой робота.
Например, роботы в больницах, сервисные роботы-официанты или хостес-роботы в ресторанах. Возможно, роботы для теле-презенса, позволяющие удаленно присутствовать и перемещаться по объекту, видя происходящее вокруг видео-камерой робота.
На конференции присутствовали не только опытные специалисты, но и новички в области робототехники. Ученики старших классов разработали мобильную интерактивную платформу, призванную показать конструктивные решения и алгоритмы управления, которые могут быть использованы для мобильных решений в различных сферах деятельности.
Было показано множество различных роботов, функции которых удивляли даже специалистов. Так, обычный на вид, робот может обнаруживать людей, записывать их передвижения, строить карты и сразу показывать людей на карте. При этом управление совсем не сложное, оно может осуществляться как с телефона, так и с планшета.
Надо понимать, что в нашей стране подавляющее большинство населения проживает в городских квартирах, где не очень большие площади, так что такому роботу, как пылесос от iRobot, и развернуться-то негде, по большому счету. С другой стороны, например, холодильники со встроенным интернетом. Это изделие скоро станет банальностью. А по мере появления большего количества продуктов с RFID метками (могут в том числе сигнализировать, что срок действия того или иного продукта истек), их популярность будет только возрастать.
С другой стороны, например, холодильники со встроенным интернетом. Это изделие скоро станет банальностью. А по мере появления большего количества продуктов с RFID метками (могут в том числе сигнализировать, что срок действия того или иного продукта истек), их популярность будет только возрастать.
Многих заинтересовал подвижный робот, использующий для передвижения только шар и постоянно самобалансирующий на нём как в движении, так и в покое. Благодаря единственной точке контакта с поверхностью, шаробот одинаково легко передвигается во всех направлениях, являясь чрезвычайно подвижным, манёвренным, и естественным в движениях.
Один из экспонатов выставки – летающий механизм, управляемый мозговыми импульсами с помощью электродов и сенсорных датчиков. На голове испытуемого в это время находятся датчики ЭЭГ (электроэнцефалография), которые считывают активность мозга и интерпретируют ее в понятный системе сигнал. После чего робот получает этот сигнал и выполняет команду.
Само собой, из этого ясно, что каких-то особых чудес ждать не придется — с помощью данной системы робот может делать не так действий, но создатели уверяют, что система управления совершенствуется и в скорее робот сможет выполнять простые команды.
Молодые ученые создали «труболаз» — прототип робота для анализа трубопровода диаметром 250–300мм. Проект должен заинтересовать предприятия и частных лиц изготавливающих оборудование для шахт и трубопроводов.
По данным Robot Industry Association (США), к 2015 году будет производиться ежегодно около 1,6 млн роботов, а уже сегодня годовая валовая прибыль предприятий, связанных с робототехникой, в мировых масштабах составляет порядка 25 млрд долларов. Особенное внимание организаторы конференции уделили разработкам в сфере персональной и сервисной робототехники.
www.ridus.ru
динамически устойчивых мобильных роботов в среде человека — проекты
Анкит Бхатия, Карл Каррен, Марк Дадли, Джоди Форлицци, Джаред Гёрнер, Ральф Холлис, Джордж Кантор, Каличаран Картикеян, Бьюнгджун Ким, Масааки Кумагаи, Том Лауэрс, Джун Сиань Леонг, Аниш Мампетта, Умашанкар Нагараджан, Суреш Нидири, Кеннет Пейсон, Кэтрин Ривард, Эрик Шерер, Майкл Шомин, Бхаскар Вайдья и Луо (Джек) Йи
Введение
В последние годы растет осознание того, что большая часть успеха в применении промышленных роботов в производстве может также стать верной для мобильных роботов в сфере услуг. В частности, роботы, которые могли бы служить личными помощниками для людей — особенно пожилых людей или людей с ограниченными физическими возможностями — переходят из фантазии в область возможного. Быстрый прогресс в вычислительной технике и растущий объем знаний в области робототехники ведут нас к цели, которая может принести много пользы обществу.
В частности, роботы, которые могли бы служить личными помощниками для людей — особенно пожилых людей или людей с ограниченными физическими возможностями — переходят из фантазии в область возможного. Быстрый прогресс в вычислительной технике и растущий объем знаний в области робототехники ведут нас к цели, которая может принести много пользы обществу.
Человеко-машинный интерфейс представляет собой ключевую область интересов, особенно в области физического взаимодействия между роботом и человеком.Промышленные роботы-манипуляторы и исследовательские мобильные роботы — это устройства с позиционным (а не принудительным) управлением, они тяжелые и неуклюжие. Их движения не могут легко приспособиться к среде, созданной для людей. Мобильные роботы, которые передвигаются с колесными приводами, медленные и неудобные, с широким основанием, обеспечивающим статическую устойчивость. Необходим совершенно другой подход к передвижению: безопасные мобильные роботы; динамично маневренный и способный на изящные движения; достаточно тонкий, чтобы легко маневрировать в загроможденной людной среде; и которые легко поддаются, когда их толкают. Интеллектуальные машины такого типа могут быть достигнуты только с динамической стабильностью .
Интеллектуальные машины такого типа могут быть достигнуты только с динамической стабильностью .
Целью нашего исследования является более глубокое понимание того, как можно достичь такой динамической маневренности в мобильных машинах, взаимодействующих с людьми и работающих в обычных домашних условиях и на рабочем месте. Для изучения этого вопроса мы разрабатываем новые динамически устойчивые прокатные машины и исследовательские платформы шагающих машин. Мы будем оценивать эффективность этого типа динамического передвижения в контексте человеческой среды.
В ходе этого исследования будут получены важные идеи по созданию гибких движущихся платформ, которые в будущем можно будет объединить с текущей работой исследовательского сообщества в области восприятия, навигации и познания, чтобы создать действительно способных интеллектуальных мобильных роботов для использования в физическом контакте с людьми. Такие роботы могут предоставить множество полезных услуг, особенно пожилым людям или людям с ограниченными физическими возможностями, в повседневной работе и дома. Можно представить себе множество других применений, таких как проникновение во враждебные среды, спасение в зданиях и наблюдение для защиты людей или имущества.
Можно представить себе множество других применений, таких как проникновение во враждебные среды, спасение в зданиях и наблюдение для защиты людей или имущества.
Исследовательская платформа Ballbot
Мы начали нашу исследовательскую программу с разработки мобильного робота размером с человека, у которого есть только одно сферическое колесо. Наши предварительные эксперименты с этой платформой описаны в статьях «Достаточно одного!» и «Динамически устойчивый одноколесный мобильный робот с инверсным приводом шарика мыши». В статье журнала Scientific American «Ballbots», опубликованной в октябрьском номере за 2006 г., содержится общее обсуждение.Более свежие технические публикации включают
Пресс-релиз Университета Карнеги-Меллона, 9 августа 2006 г.
Фотографии и видео
Балансировка робота Ballbot в лаборатории захвата движения CMU под наблюдением Ральфа Холлиса. (Фотография принадлежит Майклу Голдфейну, используется с разрешения.)
(Фотография принадлежит Майклу Голдфейну, используется с разрешения.)
Аспиранты Эрик Шарер (слева) и Аниш Мампетта (справа) с Ballbot, сфотографированы в CMU Intelligent Workplace.
Ральф Холлис (слева) и Джордж Кантор (справа) с Ballbot, сфотографированы в CMU Intelligent Workplace.
Умашанкар Нагараджан и Ballbot
Вы можете просматривать видео для:
Ballbots по всему миру
В наши дни многие люди во всем мире заинтригованы понятием шаровых роботов. Вот несколько ссылок на медиа-видео о нашем проекте Ballbot:
Вот несколько лайков к другим проектам и видео:
Ballbots — Scientific American
Мечта об интеллектуальных мобильных роботах, которые помогают людям в их повседневной деятельности в домах, офисах и учреждениях для престарелых, является неотразимой. Хотя это излюбленный предмет писателей-фантастов и исследователей робототехники, цель, тем не менее, кажется, всегда остается успешной в будущем. Инженерам еще предстоит решить фундаментальные проблемы, связанные с роботизированным восприятием и моделированием мира, автоматическим мышлением, манипулированием объектами и движением.
Хотя это излюбленный предмет писателей-фантастов и исследователей робототехники, цель, тем не менее, кажется, всегда остается успешной в будущем. Инженерам еще предстоит решить фундаментальные проблемы, связанные с роботизированным восприятием и моделированием мира, автоматическим мышлением, манипулированием объектами и движением.
Исследователи создали роботов, которые, хотя и далеко не дотягивают до идеала, могут делать некоторые замечательные вещи. В 2002 году одна группа высадила робота у входа на ежегодное собрание Американской ассоциации искусственного интеллекта в Эдмонтоне, Альберта.Умная машина вскоре нашла путь к регистрационной будке, записалась на конференцию, получила лекционную комнату, проследовала в это место и, наконец, представила краткий доклад о себе в назначенный час. Некоторые роботы тем временем эффективно служат в качестве интерактивных гидов по музеям, в то время как другие выглядят многообещающими в качестве помощников в доме престарелых. Ученые-компьютерщики и инженеры также оснастили мобильные системы руками и руками для управления объектами. Все эти экспериментальные устройства перемещаются на базах, поддерживаемых тремя или четырьмя колесами.Разработчики называют эту конфигурацию «статически стабильной», потому что она удерживает роботов в вертикальном положении даже в состоянии покоя.
Роботы, достаточно высокие, чтобы эффективно взаимодействовать в среде людей, имеют высокий центр тяжести и должны медленно ускоряться и замедляться, а также избегать крутых пандусов, чтобы не упасть. Чтобы противостоять этой проблеме, статически устойчивые роботы, как правило, имеют широкие тела на широкой колесной базе, что значительно ограничивает их мобильность через дверные проемы, вокруг мебели или людей.
Несколько лет назад я решил обойти потребность в большой колесной базе, спроектировав и построив высокого, тощего и маневренного робота, который балансирует на одном сферическом колесе и приводится в движение им. Такая простая машина с высоким центром тяжести могла бы быстро двигаться в любом направлении. Система будет полагаться на активное уравновешивание и, таким образом, будет «динамически стабильной», то есть она будет оставаться в вертикальном положении только в том случае, если она будет постоянно корректировать положение своего тела. Я понял, что эта конструкция будет представлять собой неизученный класс колесных мобильных роботов.За неимением лучшего я назвал его ballbot.
Я понял, что эта конструкция будет представлять собой неизученный класс колесных мобильных роботов.За неимением лучшего я назвал его ballbot.
Мы с учениками эксплуатируем наш шаровой робот уже несколько лет, изучая его свойства устойчивости и пригодность для работы в среде обитания человека. За это время многие посетители нашей лаборатории обнаружили, что его сверхъестественная способность балансировать и передвигаться на одном сферическом колесе весьма примечательна.
Поддержание баланса
МЫ, ЧЕЛОВЕКИ, ПОДДЕРЖИВАЕМ БАЛАНС с помощью вестибулярных органов нашего внутреннего уха.Эта информация сочетается с данными других органов чувств, например зрения, для управления мышцами наших ног и ступней, чтобы мы могли стоять прямо, не падая. Робот-мяч поддерживает равновесие аналогичным образом. Во-первых, машина должна иметь какую-то цель, например, оставаться в одном месте или двигаться по прямой между двумя точками. Во-вторых, он должен всегда знать направление силы тяжести и уметь измерять ориентацию своего тела по отношению к этому вертикальному ориентиру. В-третьих, он должен иметь средства, позволяющие вращать мяч в любом направлении и измерять его перемещение по полу. Наконец, мяч-робот должен иметь метод или политику управления, которые обрабатывают данные датчиков, которые он измеряет, для генерации команд вращения мяча, которые пытаются удовлетворить цели.
В-третьих, он должен иметь средства, позволяющие вращать мяч в любом направлении и измерять его перемещение по полу. Наконец, мяч-робот должен иметь метод или политику управления, которые обрабатывают данные датчиков, которые он измеряет, для генерации команд вращения мяча, которые пытаются удовлетворить цели.
Решение «проблемы вертикали» оказалось сложной задачей на протяжении всей истории [ см. Рамку на стр. 62 ]. В нашем решении используются преимущества последних достижений в области вычислительной техники, волоконной оптики и микроэлектромеханических систем (МЭМС), которые позволили производить недорогие устройства, имитирующие функции традиционного вращающегося гироскопа.
Мы используем систему, состоящую из трех волоконно-оптических гироскопов, установленных перпендикулярно (под прямым углом друг к другу) в коробке, жестко прикрепленной к корпусу шарового бота [ см. Рамку на противоположной странице ]. Эти гироскопы не содержат вращающихся масс. Каждый гироскоп имеет источник света, детектор и катушку из оптического волокна. Световые волны распространяются по катушке в противоположных направлениях и интерферируют друг с другом на детекторе. Во время работы корпус шарикового робота с тремя гироскопическими датчиками углового движения вращается в различных направлениях, но световые волны внутри него движутся с фиксированной скоростью независимо от любого движения.Соответственно, небольшая разница в пути между волнами, распространяющимися по и против часовой стрелки, приводит к появлению каждого датчика. В каждом случае разность хода заставляет интерференционные полосы на детекторе смещаться, создавая выходной сигнал, пропорциональный угловой скорости — эффект, отмеченный еще в 1913 году французским физиком Жоржем Саньяком. Небольшой компьютер объединяет три угловые скорости для получения углов тангажа (наклон вперед / назад), крена (наклон влево / вправо) и рыскания (вращение вокруг вертикали), принимаемых телом робота.
Каждый гироскоп имеет источник света, детектор и катушку из оптического волокна. Световые волны распространяются по катушке в противоположных направлениях и интерферируют друг с другом на детекторе. Во время работы корпус шарикового робота с тремя гироскопическими датчиками углового движения вращается в различных направлениях, но световые волны внутри него движутся с фиксированной скоростью независимо от любого движения.Соответственно, небольшая разница в пути между волнами, распространяющимися по и против часовой стрелки, приводит к появлению каждого датчика. В каждом случае разность хода заставляет интерференционные полосы на детекторе смещаться, создавая выходной сигнал, пропорциональный угловой скорости — эффект, отмеченный еще в 1913 году французским физиком Жоржем Саньяком. Небольшой компьютер объединяет три угловые скорости для получения углов тангажа (наклон вперед / назад), крена (наклон влево / вправо) и рыскания (вращение вокруг вертикали), принимаемых телом робота.
Чтобы сообщить правильную вертикальную ориентацию, все гироскопы должны учитывать вращение Земли. Они также подвержены множеству других мелких эффектов, которые со временем вызывают ошибки и дрейф. Наша система включает в себя три акселерометра MEMS, установленных перпендикулярно в одной коробке рядом с гироскопами. Когда шаровой робот перемещается, эти датчики сообщают результирующие мгновенные значения ускорения для каждой ориентации, которые компьютер затем объединяет для получения общего направления и величины ускорения, которые могут быть усреднены по времени.(Показания акселерометров нельзя использовать напрямую для балансировки.) Результатом является надежный долгосрочный индикатор направления силы тяжести, который система использует для коррекции дрейфа волоконно-оптических гироскопов.
Они также подвержены множеству других мелких эффектов, которые со временем вызывают ошибки и дрейф. Наша система включает в себя три акселерометра MEMS, установленных перпендикулярно в одной коробке рядом с гироскопами. Когда шаровой робот перемещается, эти датчики сообщают результирующие мгновенные значения ускорения для каждой ориентации, которые компьютер затем объединяет для получения общего направления и величины ускорения, которые могут быть усреднены по времени.(Показания акселерометров нельзя использовать напрямую для балансировки.) Результатом является надежный долгосрочный индикатор направления силы тяжести, который система использует для коррекции дрейфа волоконно-оптических гироскопов.
Движение с мячом
СУЩЕСТВУЕТ НЕСКОЛЬКО МЕТОДОВ для движения мяча в различных направлениях с помощью двигателей. Мы стремились к простоте конструкции механизма привода шарикового робота. Когда кто-то перемещает механическую компьютерную мышь по рабочему столу, шарик с резиновым покрытием на нижней стороне заставляет вращаться пару ортогонально установленных роликов. Измеренное вращение роликов обеспечивает компьютер для перемещения курсора по экрану. В шаровом боте происходит прямо противоположное: выходной сигнал компьютера шарового бота дает команду двигателям вращать ролики, которые вращают шар, заставляя робота двигаться в любом направлении по полу. По сути, это привод «перевернутого шарика мыши». В настоящее время двигатели приводят шар в движение в направлениях тангажа и крена. Дополнительный двигатель (еще не установленный) будет вращать корпус по рысканью, что позволит шаровому роботу повернуться в любом направлении.
Измеренное вращение роликов обеспечивает компьютер для перемещения курсора по экрану. В шаровом боте происходит прямо противоположное: выходной сигнал компьютера шарового бота дает команду двигателям вращать ролики, которые вращают шар, заставляя робота двигаться в любом направлении по полу. По сути, это привод «перевернутого шарика мыши». В настоящее время двигатели приводят шар в движение в направлениях тангажа и крена. Дополнительный двигатель (еще не установленный) будет вращать корпус по рысканью, что позволит шаровому роботу повернуться в любом направлении.
Подобно цирковому клоуну, который сидит на шаре, тело шарового робота стоит на колесе шара. Мяч представляет собой полый алюминиевый шар, покрытый толстым слоем полиуретановой резины. Такая схема привода демонстрирует фрикционные и демпфирующие свойства, поскольку между шариком и роликами всегда происходит скольжение, для чего необходимо выполнять компенсацию. Три шарикоподшипника между шаром и корпусом поддерживают вес тела.
Чтобы определить вращение шара и, следовательно, расстояние перемещения, мы использовали оптические энкодеры, которые установлены на каждом из приводных двигателей.Каждый кодировщик имеет фиксированный источник света напротив светового датчика. Между ними находится прозрачная вращающаяся маска (с множеством тонких непрозрачных полос), прикрепленная к валу двигателя. Когда двигатель вращается, маска вращается, заставляя полосатый рисунок попеременно блокировать и пропускать световой луч. Главный компьютер бота считает эти события, чтобы измерить вращение мяча и, следовательно, пройденное расстояние.
Владение мячом
ПРОСТО УКАЗАНО, шаровой робот использует свое знание вертикали, чтобы определить, как вращать свой шар, чтобы балансировать и двигаться.К счастью, шаровой робот — это, по сути, перевернутый маятник, механизм, который физики тщательно изучили. Мы используем методы теории оптимального управления, чтобы найти стратегию или политику для достижения цели, одновременно минимизируя усилия, необходимые для ее достижения. Ballbot имеет восемь внутренних состояний, которые должна учитывать политика: четыре для движения вперед / назад и четыре для движения влево / вправо. Для каждого из этих направлений система измеряет или определяет (по бортовым датчикам) положение и скорость робота, а также скорость наклона и наклона тела.
Ballbot имеет восемь внутренних состояний, которые должна учитывать политика: четыре для движения вперед / назад и четыре для движения влево / вправо. Для каждого из этих направлений система измеряет или определяет (по бортовым датчикам) положение и скорость робота, а также скорость наклона и наклона тела.
Мы используем упрощенную линейную математическую модель для описания динамики шарикового робота. Рудольф Кальман, венгерско-американский теоретик математических систем, изобрел в 1960 году элегантный метод вывода политик управления для таких систем, который он назвал линейно-квадратичным регулятором. Этот подход считает, что измерения внутренних состояний системы пропорциональны значениям самих состояний. Кроме того, предполагается, что состояния изменяются со временем со скоростью, пропорциональной значениям состояний плюс пропорциональный вклад любых управляющих воздействий, которые могут произойти, например, крутящих моментов двигателя.Метод Калмана ловко минимизирует интегральную функцию во времени, которая включает квадратичную меру состояний плюс квадратичную меру управляющих воздействий. Его решение дает окончательный набор констант, которые при умножении на каждое из внутренних состояний дают рекомендованное или оптимальное управляющее действие, которое шаровой робот должен выполнять в каждый момент времени. Эти вычисления выполняются на главном компьютере бота несколько сотен раз в секунду.
Его решение дает окончательный набор констант, которые при умножении на каждое из внутренних состояний дают рекомендованное или оптимальное управляющее действие, которое шаровой робот должен выполнять в каждый момент времени. Эти вычисления выполняются на главном компьютере бота несколько сотен раз в секунду.
Когда цель шарового робота — стоять на месте, его политика управления пытается одновременно привести положение и скорость тела, а также скорость его наклона и наклона к нулю в каждом направлении, минимизируя при этом действия, необходимые для этого.Когда его цель — перемещаться из одного места в другое, политика управления автоматически устанавливает ретроградное вращение шара, чтобы установить наклон тела, позволяя ему ускоряться вперед. По мере приближения к позиции ворот мяч автоматически ускоряется, чтобы изменить угол наклона и привести мяч в состояние покоя [ см. Рамку выше ].
Движение вперед
МЫ НАЧАЛИ экспериментировать с мячом, взаимодействуя с ним по беспроводной радиосвязи. Мы планируем добавить пару рук, а также голову, которая поворачивается и наклоняется, с системой бинокулярного зрения и многими другими датчиками, чтобы превратить машину в способного робота со значительной степенью автономности.Наша цель — понять, насколько хорошо такие роботы могут работать с людьми в повседневных условиях, и количественно сравнить их характеристики, безопасность и возможности навигации с характеристиками традиционных, статически стабильных роботов. Наша гипотеза состоит в том, что последнее может оказаться эволюционным тупиком, когда дело доходит до работы в таких средах.
Мы планируем добавить пару рук, а также голову, которая поворачивается и наклоняется, с системой бинокулярного зрения и многими другими датчиками, чтобы превратить машину в способного робота со значительной степенью автономности.Наша цель — понять, насколько хорошо такие роботы могут работать с людьми в повседневных условиях, и количественно сравнить их характеристики, безопасность и возможности навигации с характеристиками традиционных, статически стабильных роботов. Наша гипотеза состоит в том, что последнее может оказаться эволюционным тупиком, когда дело доходит до работы в таких средах.
Не только мы делаем ставку на понятие динамически стабильных роботов. Другие исследовательские группы создали двухколесных роботов, которые динамически устойчивы в направлении тангажа, но статически стабильны в ориентации крена.Хотя эти роботы не являются всенаправленными, как шаровые роботы, они обещают гибкую мобильность, особенно на открытом воздухе.
Может оказаться, что динамически стабильные двуногие роботы, возможно, в форме гуманоидов, будут иметь долгосрочное преимущество — особенно в отношении их способности справляться с лестницами. Исследовательские группы по всему миру интенсивно работают над созданием этих сложных и зачастую дорогостоящих машин. Между тем, казалось бы, что мяч-боты будут служить интересными и эффективными платформами для изучения того, как мобильные роботы могут динамически и изящно взаимодействовать с людьми в местах их обитания.
Исследовательские группы по всему миру интенсивно работают над созданием этих сложных и зачастую дорогостоящих машин. Между тем, казалось бы, что мяч-боты будут служить интересными и эффективными платформами для изучения того, как мобильные роботы могут динамически и изящно взаимодействовать с людьми в местах их обитания.
Этот «мяч-бот» похож на настоящий BB-8 — TechCrunch
Он не так привлекателен, как сферический дроид из «Звездных войн: Пробуждение силы», но этот робот из Университета Карнеги-Меллона обладает преимуществом, заключающимся в том, что он представляет собой нечто большее, чем особый эффект (каким бы крутым он ни был). И хотите верьте, хотите нет, но в нем практически нет движущихся частей.
Теперь вы можете подумать: «Заголовок сообщения CMU об этом роботе гласит:« Две движущиеся части », ты красивый дурак». Но читайте внимательно (и спасибо!).Одна из этих движущихся частей — это сам робот, когда он перемещается по комнате; когда вы бросаете, вы не говорите, что у бумажного самолетика есть движущиеся части. Другой — мяч, по которому он движется, и он даже не связан с верхней частью! Так что я придерживаюсь нуля, несмотря на экспертов. Вот, Я знаток.
Другой — мяч, по которому он движется, и он даже не связан с верхней частью! Так что я придерживаюсь нуля, несмотря на экспертов. Вот, Я знаток.
Как бы то ни было, робот на самом деле является эволюцией конструкции десятилетней давности: Ральф Холлис создал «мяч-бота» давным-давно, но он управлялся механически. То, как это работает, на самом деле довольно легко представить: представьте шарик мыши, но вместо шарика, который перемещает маленькие ролики внутри, ролики перемещают мяч.
Тщательное управление этими двигателями позволяет роботу балансировать на вершине шара, а также катить его в любом направлении. Проблема была такая же, как и с этими мышами: ролики изнашивались или загрязнялись, их нужно было заменить, а двигатели перенастроить.
Сферический асинхронный двигатель, перевернутый, чтобы показать детали.
Решение заключалось не в том, чтобы удалить шарик, как мы делали с мышами, а в том, чтобы удалить ролики . В новой версии используется асинхронный двигатель, который магнитным образом приводит в движение сферу (твердое железо с медной оболочкой) с помощью статоров, как другие асинхронные двигатели приводят в движение ротор.
Это снижает износ и увеличивает уровень контроля над мячом, так как меньше механических сил, о которых нужно беспокоиться. Просто отрегулируйте напряжение и магнитную силу на шаре, чтобы он двигался туда, куда вы хотите. Бортовые системы удерживают его в вертикальном и сбалансированном положении, и он может восстанавливаться после толкания — не так сильно, как робот на ногах, но все же.
SIMbot (для сферического асинхронного двигателя) по-прежнему в значительной степени является лабораторным экспериментом, но его всенаправленное движение и сложные, но элегантные механизмы управления, вероятно, вызывают зависть у роботов, которые используют ноги или несколько колес для передвижения.
Ballbot Rezero имеет высоту 1 м, вес 14. 5 кг, и …
Контекст 1
… I ВВЕДЕНИЕ Ballbots — это новый класс роботов [1], [2], [3], [4], которые перемещаются, динамически балансируя на сфера. Они занимают очень мало места и способны выполнять высокодинамичные движения. Ballbots динамически стабилизируются с помощью управления с обратной связью, которое предпочтительно использует обратную связь по состоянию. То есть оценки положения, скорости, ориентации и угловых скоростей тела используются для формирования закона управления.Современные исследовательские платформы часто демонстрируют схожие настройки датчиков, но различаются способами обработки показаний датчиков. Например, Ballbot, построенный У. Нагараджаном и др. в Университете Карнеги-Меллона [2] использует инерциальный измерительный блок (IMU) и датчики вращения в механизме привода шара. Опираясь на точную оценку положения основного тела, показания датчика угла поворота напрямую преобразуются в оценки скорости и положения робота, тогда как ориентация получается из IMU, который внутренне объединяет измерения от трех скоростных гироскопов и трех акселерометров. Точно так же BallIP, Ballbot, разработанный M. Kumagai и T. Ochiai [3], использует механизм привода шара с шаговыми двигателями, которые по своей сути доставляют информацию о положении и скорости при срабатывании. Процесс оценки состояния аналогичен процессу робота CMU, но вместо получения отношения от стандартного IMU он вычисляется с помощью дополнительного фильтра, объединяющего необработанные данные гироскопа и акселерометра. Другие применяют аналогичные методы [1], [4]. В отличие от вышеупомянутых подходов, которые разделяют процессы оценки ориентации и положения, в этой статье представлен единый фильтр, который оценивает полное состояние робота.При таком подходе информация может течь в обоих направлениях; то есть оценка ориентации будет не только полагаться на данные IMU, но также будет извлекать выгоду из измерений кодировщика. Это достигается за счет реализации расширенного фильтра Калмана (EKF), который объединяет данные с энкодеров, акселерометров и гироскопов. Кинематическая модель используется для прогнозирования состояний путем интеграции измерений акселерометра и гироскопа, в то время как на этапе обновления используются измерения кодера, используя кинематические контактные ограничения робота и мяча.
Точно так же BallIP, Ballbot, разработанный M. Kumagai и T. Ochiai [3], использует механизм привода шара с шаговыми двигателями, которые по своей сути доставляют информацию о положении и скорости при срабатывании. Процесс оценки состояния аналогичен процессу робота CMU, но вместо получения отношения от стандартного IMU он вычисляется с помощью дополнительного фильтра, объединяющего необработанные данные гироскопа и акселерометра. Другие применяют аналогичные методы [1], [4]. В отличие от вышеупомянутых подходов, которые разделяют процессы оценки ориентации и положения, в этой статье представлен единый фильтр, который оценивает полное состояние робота.При таком подходе информация может течь в обоих направлениях; то есть оценка ориентации будет не только полагаться на данные IMU, но также будет извлекать выгоду из измерений кодировщика. Это достигается за счет реализации расширенного фильтра Калмана (EKF), который объединяет данные с энкодеров, акселерометров и гироскопов. Кинематическая модель используется для прогнозирования состояний путем интеграции измерений акселерометра и гироскопа, в то время как на этапе обновления используются измерения кодера, используя кинематические контактные ограничения робота и мяча.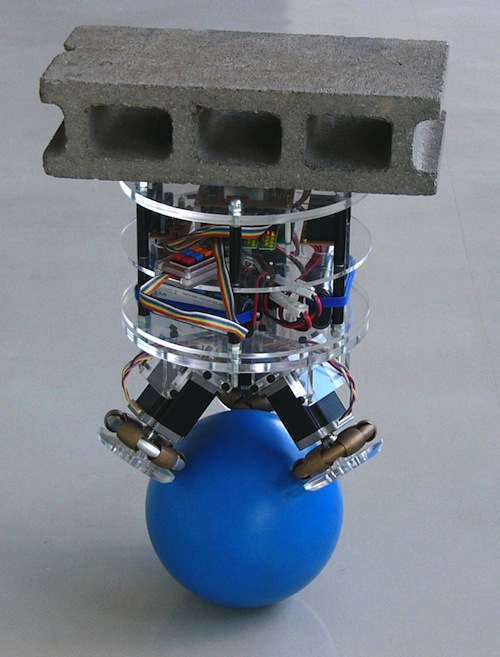 Отношение представлено как непараметрическая матрица преобразования, в то время как неопределенности оцененного отношения представлены и распространяются с помощью вектора вращения ошибки [6]. Анализ наблюдаемости показывает, что в этой установке не наблюдаются только абсолютные положения и вращения относительно направления силы тяжести. Представленный фильтр оценивается на наборе данных, собранном на Ballbot Rezero (рис. 1). Rezero управляется на частоте 160 Гц линейно-квадратичным регулятором на основе линеаризованной динамической модели.Подобно вышеупомянутым платформам, он оснащен поворотными энкодерами для каждого омниколеса с приводом от шара, а также IMU. Однако для оценки состояния используются только необработанные данные акселерометра и гироскопа. Остальная часть этого документа организована следующим образом: Раздел II знакомит с состояниями фильтра и сигналами измерения, обсуждает модель системы и выводит уравнения фильтра для этапов прогнозирования и обновления. В разделе III анализируется наблюдаемость системы, а в разделе IV эффективность фильтра оценивается на основе 190 секунд примерного вождения, в котором оценки ориентации и скорости сравниваются с данными, полученными при захвате движения.
Отношение представлено как непараметрическая матрица преобразования, в то время как неопределенности оцененного отношения представлены и распространяются с помощью вектора вращения ошибки [6]. Анализ наблюдаемости показывает, что в этой установке не наблюдаются только абсолютные положения и вращения относительно направления силы тяжести. Представленный фильтр оценивается на наборе данных, собранном на Ballbot Rezero (рис. 1). Rezero управляется на частоте 160 Гц линейно-квадратичным регулятором на основе линеаризованной динамической модели.Подобно вышеупомянутым платформам, он оснащен поворотными энкодерами для каждого омниколеса с приводом от шара, а также IMU. Однако для оценки состояния используются только необработанные данные акселерометра и гироскопа. Остальная часть этого документа организована следующим образом: Раздел II знакомит с состояниями фильтра и сигналами измерения, обсуждает модель системы и выводит уравнения фильтра для этапов прогнозирования и обновления. В разделе III анализируется наблюдаемость системы, а в разделе IV эффективность фильтра оценивается на основе 190 секунд примерного вождения, в котором оценки ориентации и скорости сравниваются с данными, полученными при захвате движения. ..
..
[PDF] The ballbot: всенаправленный балансирующий мобильный робот
ПОКАЗЫВАЕТ 1-10 ИЗ 33 ССЫЛОК
СОРТИРОВАТЬ по релевантностиСамые популярные статьи Недавность
Физическое взаимодействие человека и робота с динамически стабильными мобильными роботами
Разработаны базовые модели поведения Ballbot, которые позволяют для обнаружения человеческих намерений с помощью физического взаимодействия, которое он имеет, используя только кодировщик и данные IMU, и представлены первоначальные результаты в разработке поведения Learn-Repeat. Развернуть- Просмотреть 3 выдержки, справочный фон и результаты
Планировщик пространства формы для мобильных роботов с балансировкой с ускорением формы
В этом документе представлен планировщик траектории формы, который использует уравнения динамических ограничений для планирования траекторий в пространстве формы, что при отслеживании приведет к в приблизительном отслеживании желаемых позиционных траекторий.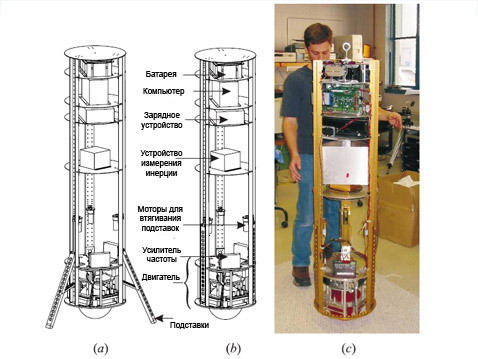 Развернуть
Развернуть- Просмотреть 2 выдержки, справочную информацию и методы
Динамически устойчивый одноколесный мобильный робот с инвертированным движением мяча мыши
- Т. Лауэрс, Г. Кантор, Р. Холлис
- Инженерия, информатика
- Proceedings 2006 IEEE International Conference on Robotics and Automation, 2006. ICRA 2006.
- 2006
- Просмотреть 5 выдержек, ссылки, методы и справочную информацию
Разработка робота, балансирующего на шаре
- М. Кумагаи, Т. Очиаи
- Инженерное дело
- Международная конференция по управлению, автоматизации и системам 2008 г.
- 2008
В этой статье предлагается робот, балансирующий на шаре. В отличие от перевернутого маятника с двумя колесами, такого как Segway Human Transporter, перевернутый маятник, использующий мяч, может перемещаться в любом… Развернуть
В отличие от перевернутого маятника с двумя колесами, такого как Segway Human Transporter, перевернутый маятник, использующий мяч, может перемещаться в любом… Развернуть
- Просмотреть 6 отрывков, справочные методы и фон
Переход между состояниями, балансировка, сохранение станции , и управление рысканием для динамически стабильного мобильного робота с одним сферическим колесом
В этой статье рассматривается мобильный робот с шариковым роботом, который динамически балансирует на одном сферическом колесе, и представляет усовершенствованную конструкцию с четырехмоторным обратным приводом шарика мыши, приводом рыскания, привод ног, система управления и результаты, включая динамическую балансировку, удержание станции и рыскание при балансировке.РазвернутьДостаточно одного!
Представлены общая конструкция, исполнительный механизм, основанный на инверсном приводе шарика мыши, система управления и начальные результаты, включая динамическую балансировку, удержание станции и двухточечное движение. ExpandGolem Krang: динамически стабильный робот-гуманоид для мобильных манипуляций
Конструкция мобильного туловища учитывает ряд факторов, включая его пригодность для среды обитания человека, механическую простоту и способность хранить потенциальную и кинетическую энергию для работы с тяжелыми людьми и даже сверх- человеческие задачи.Развернуть- Просмотреть 1 отрывок, справочная информация
ERROSphere: робот-уравновешивающий
- Л. Хаваси
- Математика
- Международная конференция по управлению и автоматизации, 2005 год
- 2005
В этой статье исследуется специализированная тема механической стабилизации контроль, который ранее не привлекал особого внимания, а именно активное уравновешивание тела, балансирующего на вершине сферы.… Развернуть
- Просмотреть 2 отрывка, справочная информация
Балансирующий бот ведет вперед
Все началось 12 лет назад с ballbot, робота с высоким тонким телом, который движется в любом направлении, реагирует на легкий толчок и балансирует на сфере, немного меньшей, чем шар для боулинга.
Хотя робот идеально подходит для помощи пожилым людям или инвалидам в их домах, исследователи знали, что роликовый механизм можно упростить, чтобы сократить техническое обслуживание и сократить расходы.
Войдите в SIMbot. Исследователи из Университета Карнеги-Меллона недавно улучшили своего робота.
Изобретатель Ballbot Ральф Холлис называет конструкцию балансировки шара новым фундаментальным методом передвижения роботов. Холлис и Масааки Кумагаи, профессор инженерии в Университете Тохоку Гакуин в Японии, разработали SIMbot вместе с аспирантами.
«Тем не менее, этот приводной механизм довольно сложен, — говорит Холлис, профессор Института робототехники CMU. «В нем пять двигателей, есть ремни и фрикционные элементы. Вот тут-то и пригодится SIMbot ».
Несмотря на то, что SIMbot использует механизм качения, похожий на ballbot, он включает в себя только одну движущуюся часть: мяч.
Сферический асинхронный двигательSIMbot (таким образом, SIM) устраняет механические приводные системы, которые использовались в предыдущих шаровых роботах. Новый мотор также может перемещать мяч в любом направлении, используя только электронное управление.Эти движения удерживают тело SIMbot в равновесии над мячом, говорит Холлис.
Бывший студент робототехники CMU Грег Зейфарт позирует рядом с SIMbot, над которым он помогал работать. Изображение: Университет Карнеги-МеллонаБаланс — ключ к успеху
«То, что мы пытаемся сделать с помощью ballbot в течение долгого времени, — это показать, что он может делать все, что может сделать любой другой мобильный робот, но также может делать гораздо больше из-за балансировки и всенаправленного поведения», — говорит Холлис.
«Мы показали, что он может катиться со скоростью около двух метров в секунду; быстрее, чем быстрая ходьба человека. И мы можем положить на него руки, чтобы он мог вести человека через комнату, перемещаясь, прикладывая побуждающие силы к человеку при балансировании », — добавляет он.
Баланс — это ключ к успеху, — говорит Холлис. Если человек, которого ведет робот, спотыкается или меняет направление, робот остается в вертикальном положении. Это означает, что он может вести и направлять людей с ограниченными возможностями, например слепых или людей с ограниченными возможностями передвижения.Шариковый робот также может наклоняться, чтобы помочь человеку подняться со стула, переносить пакеты, размещать предметы на столешнице и переносить предметы на подобной подносу поверхности среди других задач.
Но, в отличие от сложной системы привода ballbot, SIMbot почти не имеет механики. «По сути, SIMbot — это робот, состоящий из тела и шара», — говорит Холлис. «Рама является копией ballbot, и мы продемонстрировали, что он может иметь производительность, аналогичную ballbot».
Более того, благодаря своей механической простоте, SIMbot требует меньше обычного обслуживания и меньше подвержен механическим сбоям, говорит Майкл Шомин, доктор философии.D. студент по робототехнике, который работает в команде Холлиса.
Новый двигатель может перемещать мяч в любом направлении, используя только электронное управление. Ротор сферического асинхронного двигателя представляет собой полый железный шар с медной оболочкой. Ток индуцируется в шаре с помощью шести стальных пластинчатых статоров, каждый с трехфазными проволочными обмотками.
«Ремни, приводящие в движение ролики, изнашиваются и нуждаются в замене», — говорит он. «И когда ремни заменяются, систему необходимо откалибровать.«Твердотельная система нового двигателя исключает необходимость такого обслуживания.
Шесть статоров генерируют бегущие магнитные волны в шаре, заставляя шар двигаться в направлении волны. Направление магнитных волн можно регулировать, изменяя токи в статорах.
Будущий редизайн
Хотя SIMbot действительно движется так же быстро, как ballbot, он потребляет вдвое больше энергии, чем его механический аналог.
Холлис и Кумагаи намерены изменить конструкцию мяча, используя другие материалы, а также внести другие изменения в конструкцию и программное обеспечение для повышения эффективности двигателя.Они также ожидают, что стоимость механически простого двигателя снизится по сравнению с двигателем с шаровой головкой.
Высокий и тощий SIMbot может быть столь же полезным для людей, как и ожидает Холлис мяч. По его словам, на самом деле эти типы роботов — идеальные помощники для людей.
«Они не могут попасть в загроможденное пространство, они могут пройти через узкие дверные проемы. А если они что-то наткнутся, они могут уступить », — говорит он. «А оружием они помогают людям механически. Все эти возможности в настоящее время есть в ballbot и могут быть переданы SIMbot.”
Жан Тилмани — независимый писатель.
По сути, SIMbot — это робот, состоящий из тела и мяча. Рама является копией ballbot, и мы продемонстрировали, что он может иметь производительность, аналогичную ballbot. Проф. Ральф Холлис, CMU
Движение N-гетероциклических карбенов на золотых поверхностях по типу Ballbot
Лав, Дж. К., Эстрофф, Л. А., Крибель, Дж. К., Нуццо, Р. Г. и Уайтсайдс, Г. М. Самособирающиеся монослои тиолатов на металлах как форма нанотехнологии. Chem. Ред. 105 , 1103–1169 (2005).
CAS Статья Google ученый
Нуццо, Р. Г. и Аллара, Д. Л. Адсорбция бифункциональных органических дисульфидов на золотых поверхностях. J. Am. Chem. Soc. 105 , 4481–4483 (1983).
CAS Статья Google ученый
Вейсе, М., Викес, Б. Т., Кастнер, Д.Г. и Чжан, М. Управляемое формирование клеточного рисунка на подложках из диоксида золота и кремния с помощью поверхностной молекулярной инженерии. Биоматериалы 25 , 3315–3324 (2004).
CAS Статья Google ученый
Хопкинсон, М. Н., Рихтер, К., Шедлер, М. и Глориус, Ф. Обзор N-гетероциклических карбенов. Природа 510 , 485–496 (2014).
CAS Статья Google ученый
Жуховицкий, А.В., МакЛеод, М. Дж. И Джонсон, Дж. А. Карбеновые лиганды в химии поверхности: от стабилизации дискретных элементарных аллотропов до модификации наноразмерных и объемных субстратов. Chem. Ред. 115 , 11503–11532 (2015).
CAS Статья Google ученый
Vougioukalakis, G.C. & Grubbs, R.H. Гетероциклические карбенкоординированные катализаторы метатезиса олефинов на основе рутения. Chem. Ред. 110 , 1746–1787 (2010).
CAS Статья Google ученый
Fortman, G.C. & Nolan, S.P. Лиганды N-гетероциклического карбена (NHC) и палладий в гомогенном катализе кросс-сочетания: идеальное сочетание. Chem. Soc. Ред. 40 , 5151–5169 (2011).
CAS Статья Google ученый
Канчев, Э. А. Б., О’Брайен, К. Дж. И Орган, М. Г. Палладиевые комплексы N-гетероциклических карбенов в качестве катализаторов реакций кросс-сочетания — взгляд химика-синтетика. Angew. Chem. Int. Эд. 46 , 2768–2813 (2007).
CAS Статья Google ученый
Чжао Д., Кандиш Л., Пол Д. и Глориус Ф. N-гетероциклические карбены в асимметричном гидрировании. ACS Catal . 6 , 5978–5988 (2016).
CAS Статья Google ученый
Якобсен, Х., Корреа, А., Поатер, А., Costabile, C. & Cavallo, L. Понимание связи M (NHC) (NHC = N-гетероциклический карбен). Coord. Chem. Ред. 253 , 687–703 (2009).
CAS Статья Google ученый
Марион, Н., Рамон, Р. С. и Нолан, С. П. [(NHC) Au (I)] — катализируемая бескислотная гидратация алкина при частичной миллионной загрузке катализатора. J. Am. Chem. Soc. 131 , 448–449 (2009).
CAS Статья Google ученый
Вайднер Т.и другие. Самособирающиеся монослои на основе NHC на твердой золотой подложке. Aust. J. Chem. 64 , 1177–1179 (2011).
CAS Статья Google ученый
Жуховицкий А.В., Маврос М.Г., Ван Вурхис Т. и Джонсон Дж. А. Адресные карбеновые анкеры для золотых поверхностей. J. Am. Chem. Soc. 135 , 7418–7421 (2013).
CAS Статья Google ученый
Crudden, C.M. et al. Сверхстабильные самоорганизующиеся монослои N-гетероциклических карбенов на золоте. Нац. Chem. 6 , 409–414 (2014).
CAS Статья Google ученый
Диас Арадо, О. и др. Поверхностное азид-алкиновое циклоприсоединение к Au (111). САУ Нано 7 , 8509–8515 (2013).
CAS Статья Google ученый
Чжун, Д.и другие. Линейная полимеризация алканов на поверхности золота. Наука 334 , 213–216 (2011).
CAS Статья Google ученый
Griffiths, M. B. E. et al. Поверхностно-активное вещество направлено на рост металлических нанопластин золота путем химического осаждения из газовой фазы. Chem. Матер. 27 , 6116–6124 (2015).
CAS Статья Google ученый
Джонсон, Дж.А. и Жуховицкий А. В. Изделия и методы, содержащие стойкие карбены и родственные им композиции. Патент WO WO2014160471A2 (2014).
Вучкова, А. М., Фелиз, М., Клот, Э., Эйзенштейн, О. и Крэбтри, Р. Х. Карбоксилаты имидазолия как универсальные и селективные агенты переноса N-гетероциклического карбена: синтез, механизм и применение. J. Am. Chem. Soc. 129 , 12834–12846 (2007).
CAS Статья Google ученый
Чжун, Д., Ведекинг, К., Чи, Л., Эркер, Г. и Фукс, Х. Молекулярные роторы поверхностного монтажа с переменными функциональными группами и радиусами вращения. Nano Lett. 9 , 4387–4391 (2009).
CAS Статья Google ученый
Барт, Дж. В., Брюн, Х., Эртл, Г. и Бем, Р. Дж. Наблюдения с помощью сканирующей туннельной микроскопии на реконструированной поверхности Au (111): атомная структура, дальнодействующая сверхструктура, вращательные домены и поверхностные дефекты. Phys. Ред. B 42 , 9307–9318 (1990).
CAS Статья Google ученый
Фойгтлендер, Б., Мейер, Г. и Амер, Н. М. Эпитаксиальный рост тонких магнитных пленок кобальта на Au (111) исследовали с помощью сканирующей туннельной микроскопии. Phys. Ред. B 44 , 10354–10357 (1991).
Артикул Google ученый
Чжан Л.и другие. Селективное по месту и конфигурации закрепление железо-фталоцианина на краях ступенек поверхности Au (111). J. Phys. Chem. С 115 , 10791–10796 (2011).
CAS Статья Google ученый
Bo, M., Morgenstern, K., Schneider, W.-D., Berndt, R. & Wo, C. Самосборка 1-нитронафталина на Au (111). Прибой. Sci. 444 , 199–210 (2000).
Артикул Google ученый
Сяо, В.D. et al. Влияние симметрии молекулы гетероциркулена на двумерную кристаллизацию. Sci. Отчет 4 , 5415 (2014).
CAS Статья Google ученый
Zhang, H. et al. Золотоорганические гибриды на поверхностной подложке: поверхностный синтез и поверхностно-направленная ориентация. Малый 10 , 1361–1368 (2014).
CAS Статья Google ученый
Перера, У.G. et al. Управляемое вращение молекулярного двигателя по часовой стрелке и против часовой стрелки. Нац. Nanotechnol. 8 , 46–51 (2013).
CAS Статья Google ученый
Gimzewski, J. K. et al. Вращение одиночной молекулы внутри супрамолекулярного подшипника. Наука 281 , 531–533 (1998).
CAS Статья Google ученый
Кумагаи, М.& Ochiai, T. Разработка робота, балансирующего на шаре. в Int. Конф. Управление, автоматизация и системы 433–438 (IEEE, 2008).
Максимович, П., Сореску, Д. К. и Йейтс, Дж. Т. Мл. Связывание, опосредованное золотом адатомом, в самоорганизующихся короткоцепочечных формах алкантиолятов на поверхности Au (111). Phys. Rev. Lett. 97 , 146103 (2006).
Артикул Google ученый
Гао, Л.и другие. Создание массива закрепленных одномолекулярных роторов на золотых поверхностях. Phys. Rev. Lett. 101 , 197209 (2008).
CAS Статья Google ученый
Нгуен, Х. К., Шия, Б. М. и Дольцинис, Н. Л. Электрическая проводимость механически напряженного молекулярного соединения из первых принципов: решающая роль структурной релаксации и выборки конформации. Phys. Ред. B 90 , 115440 (2014).
Артикул Google ученый
Weinberger, D. S. et al. Выделение нейтральных моно- и биядерных комплексов золота с циклическими (алкил) (амино) карбенами. Angew. Chem. Int. Эд. 52 , 8964–8967 (2013).
CAS Статья Google ученый
Jerabek, P.